
Consider, if you will, this lovely training aid for very young dragon riders. (Artist unknown. Via Bored Panda.)
Technology, Rambling and Dragons
Consider, if you will, this lovely training aid for very young dragon riders. (Artist unknown. Via Bored Panda.)
I have written in glowing terms in the past about Sherwood Forest Faire, and I’m still a big fan now, twelve(!) years from my first visit. But I’d like to tell you about (and show you) a specific event within Sherwood that merits more attention: the Hawk Walk.
Sometimes when there’s a global pandemic, you don’t use your car for a long time. Sometimes when you don’t use your car for a long time, a possum will make its home in the front bumper. And sometimes, when that happens, stray dogs will rip your car apart trying to kill the possum.
Dear gadget vendors: I like gadgets (at least good ones). I buy lots of them. I will probably continue to do so as disposable income allows. But I have a plea:
Please stop including a USB cable in the package with your products.
It’s unnecessary, it’s wasteful, it’s a giant hassle when the said cable is lousy (as it all too often is) and the cost of the “free” cable adds to the overall cost of your product.
(This is an update of an article I wrote in 2011. Because so much has changed, I’ve opted for a re-write instead of just updating the original. The re-write went up in 2017; I have updated it for 2023.)
MediaWiki is the software behind Wikipedia, but you can use it to create your own special-purpose sites. I’ve used it at work to build an internal company knowledge base, and at home to make a Wiki for the fictional worlds of a couple of roleplaying games I’ve been in.
It’s a pretty polished software package, but out of the box it tends to assume that you are creating something like Wikipedia that is visible to (and editable by) the whole wide world. If that’s not what you want, it requires some tuning, which I’ll describe in detail after the jump.
I’ve got a Kenwood TM-D710A ham radio transceiver. This handy device is a portable 50W dual-band (2m and 70cm) radio, with a built-in packet radio TNC and some native APRS features. What it does not have (unlike the new TM-D710GA model) is a built-in GPS receiver.
This is a problem that can be fixed with a surprisingly small parts budget, provided you’re up for some fine-pitch soldering. Details after the break.
Consider the following purely hypothetical scenario: You do a lot of your work inside a web browser. Stuff on your workplace network (like the bug tracking system, the company Wiki and the source control system) you have to access directly. Stuff outside you have to access via a proxy (because the direct access is filtered in a haphazard way that blocks websites of your vendors and customers, as well as resources you need to do your job).
You can go manually change the network settings in your browser every time you go back and forth. You can set up two different browsers (one proxied and another not). You can use a browser add-on that lets you manually toggle proxy settings with one click.
Better still if you didn’t have to do any of that stuff and your browser would just automatically do the Right Thing. With Firefox, you can achieve this result reasonably easily using a “Proxy Auto-Configuration File” (or PAC file, for short). Read on for details.
![]()
All I want to do is wear a costume and get drunk in the woods.
— Unknown Patron, Sherwood Forest Faire, outside Three Stags pub, Saturday 13 February 2016 [personal communication]
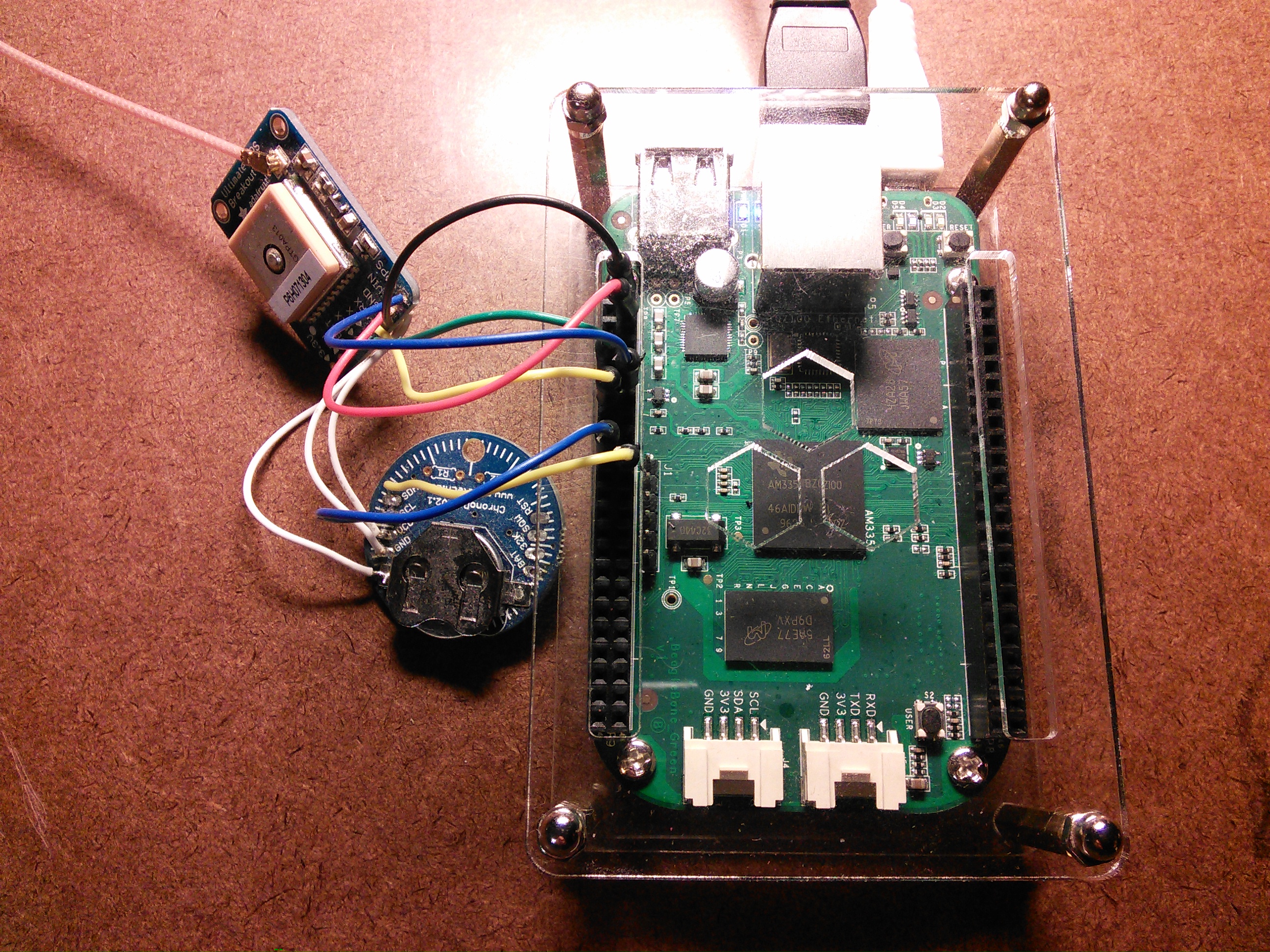 If you need a local time server, a BeagleBone Green (or BeagleBone Black) with a battery-backed real time clock and a GPS receiver with a PPS (pulse per second) output can be a cost-effective option with surprisingly good performance. Read on for detailed information about how to set up such a server.
If you need a local time server, a BeagleBone Green (or BeagleBone Black) with a battery-backed real time clock and a GPS receiver with a PPS (pulse per second) output can be a cost-effective option with surprisingly good performance. Read on for detailed information about how to set up such a server.
Cyanogenmod is a custom firmware distribution for Android devices. When I installed CM12.1 (based on Android 5.1.1 aka Lollipop aka API level 22), I noticed a problem with the Netflix application: When I tried to watch content, I’d get audio and see subtitles, but there was no video (just a black background).
Long story short: Netflix video playback doesn’t work if the new CM12.1 “LiveDisplay” feature is enabled, which it is by default. (LiveDisplay is a feature of CM12.1 which adjusts the display to have a warmer color temperature between local sunset and sunrise.) To complicate things, the problem only manifests at night (when LiveDisplay is actually active).
If you’re on CM12.1 and can’t get your Netflix on when the sun is down, disable LiveDisplay and try again. Instructions after the jump.