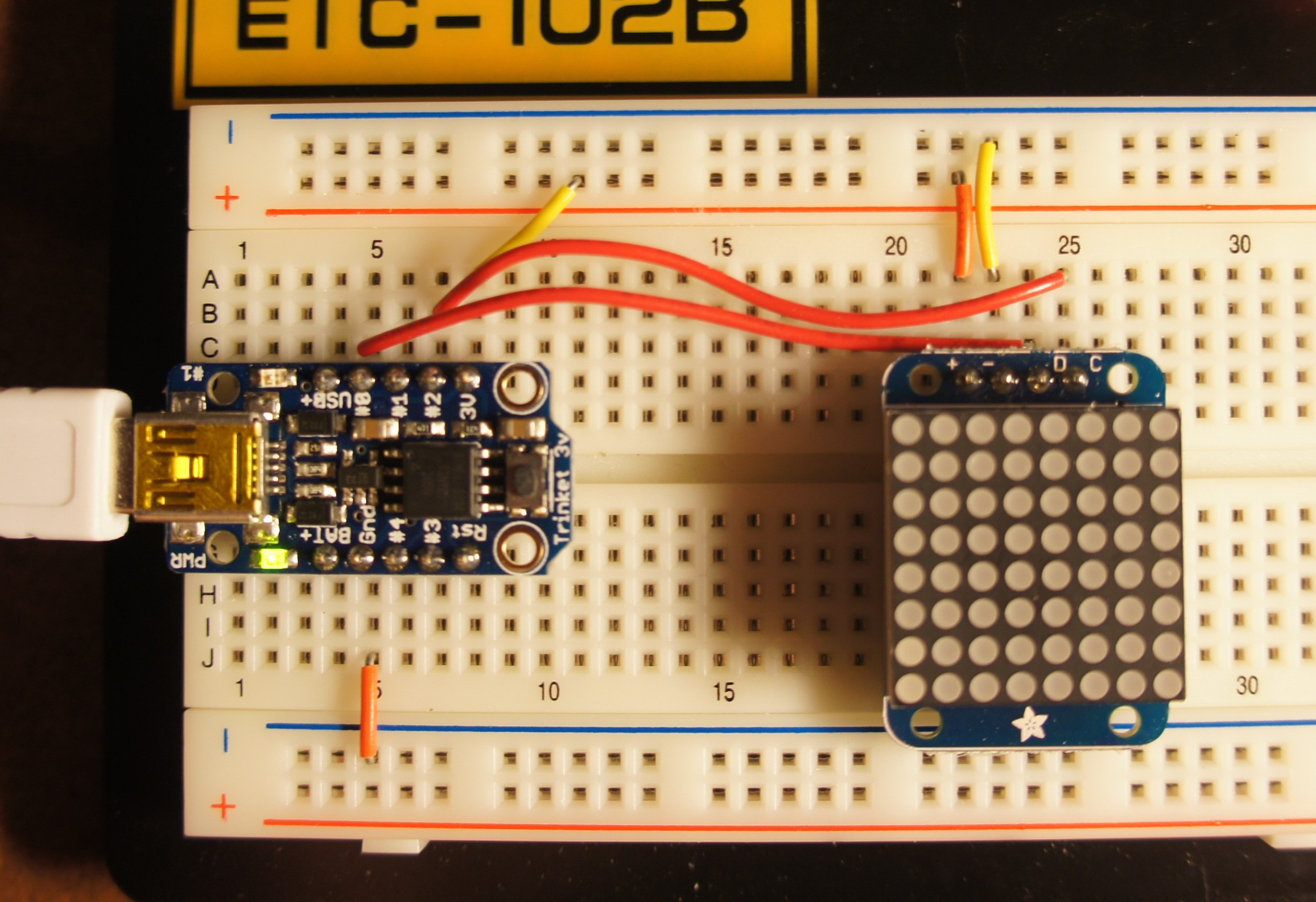
This is another article in my series about developing a magnetometer-based digital compass. Last time, I talked about estimating code size, and what I might do to fit the application in the roughly 5.25K program space available on an Adafruit Trinket.
In this article, I replace the floating-point math with fixed-point, and make various space-saving improvements to the calibration and rotation code. Read on for more.